{kind=link}
L’ADAS (système d’aide à la conduite) est directement liés à de nombreux sous-ensembles et équipements, comme les capteurs, l’unité de calcul (qui gère le contrôle principal des véhicules autotractés), la surveillance des systèmes de sécurité, les boucles de contrôle ou encore la limitation de la puissance. Tous indispensables pour que le véhicule autonome puisse très largement contribuer à rendre la mobilité future plus efficace, plus sûre et plus propre.
Comment fonctionne un véhicule autonome ?
Les capteurs sont des éléments clés pour rendre un véhicule totalement autonome. La caméra, le radar, les ultrasons et le LiDAR (système de détection et estimation de la distance par la lumière) permettent à un véhicule autonome de visualiser son environnement et de détecter des objets. Les voitures d’aujourd’hui sont équipées d’un nombre croissant de capteurs environnementaux qui accomplissent une multitude de tâches. Le système de contrôle des capteurs intégrés pour l’audiovisuel comprend trois parties : la perception, la décision et l’exécution.
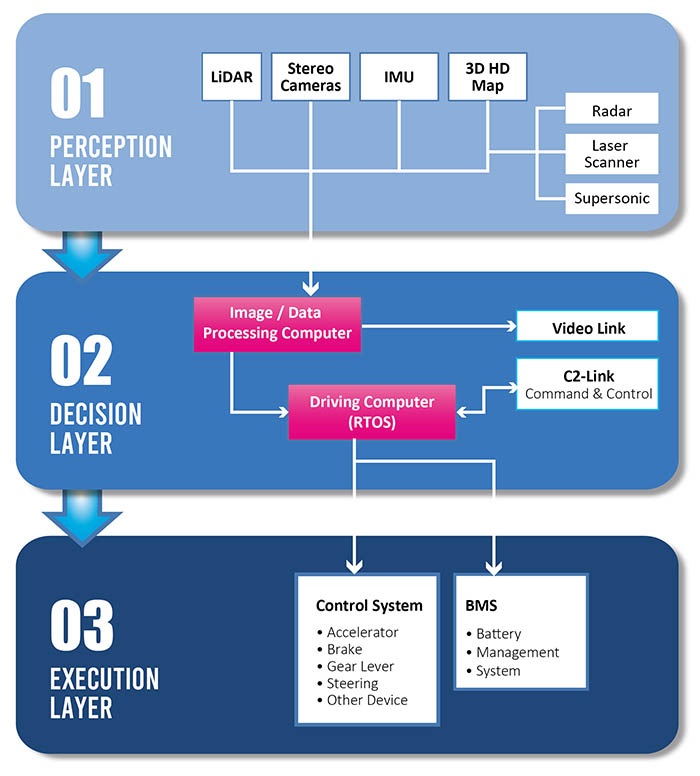
La perception
La perception permet aux capteurs non seulement de détecter des objets, mais aussi d’acquérir et éventuellement de classifier et de suivre les objets environnants. La tâche de perception des capteurs comprend trois parties : la localisation, la détection et le suivi. Toutes ces tâches sont réalisées grâce à la fusion de données effectuée à différents niveaux. Par exemple, la localisation est généralement effectuée par des algorithmes qui fusionnent les données du GPS, de l’IMU (centrale à inertie) et du LiDAR, ce qui donne une carte de groupe haute résolution. Les technologies d’apprentissage basées sur la vision permettent d’obtenir des résultats précis pour la détection d’objets, car elles peuvent traiter de manière autonome d’énormes quantités de données.
La décision
La prise de décision est l’une des tâches les plus difficiles que les véhicules autonomes doivent accomplir. Elle englobe la prévision, la planification de la trajectoire et l’évitement des obstacles. Toutes ces tâches sont effectuées sur la base de perceptions antérieures. En tant que partie la plus importante d’un système de capteurs intégrés, la prise de décision nécessite au moins deux PC pour accomplir des missions critiques : un des PC EDGE computing traite l’énorme quantité de données EDGE fournies par les capteurs (Image Processing Computer), puis transfère les données classifiées à un autre PC Driving Computer. À l’aide des données analysées, le Driving Computer peut commander des dispositifs, par exemple l’accélérateur et le frein pour ajuster la vitesse.
L’exécution
La couche d’exécution consiste en une interconnexion entre l’accélérateur, les freins, la boîte de vitesses, etc. Pilotés par le système d’exploitation en temps réel (RTOS), tous ces dispositifs peuvent exécuter les commandes émises par l’ordinateur de conduite, réalisant ainsi ce que l’IA s’est fixé comme objectif. Ainsi, le véhicule autonome est capable d’exécuter toutes les actions mécaniques nécessaires connues sous le nom de “quatre piliers” du fonctionnement du véhicule : Direction, changement de vitesse, accélération et freinage.

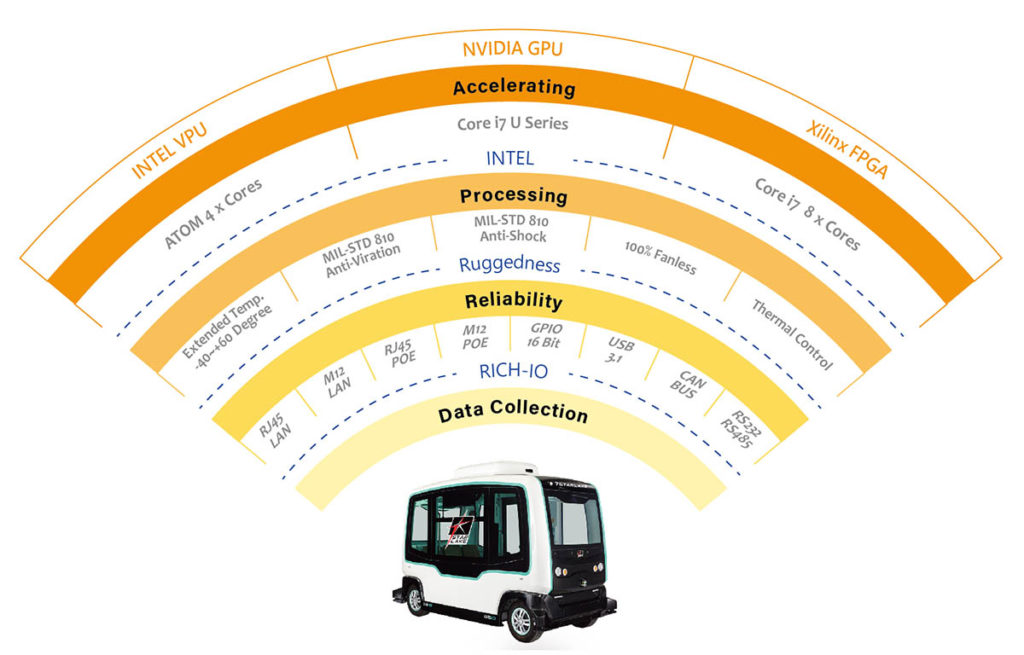
Une puissance de calcul haute performance requise grâce aux serveurs GPU 7Starlake

L’unité de contrôle de conduite automatisée est le contrôleur principal des véhicules autonomes. 7Starlake a conçu un PC GPGPU de haute performance pour EASYMILE afin de réaliser la navette sans conducteur la plus avancée. La navette EZ10 a été lancée en 2015 à Toulouse et a fonctionné dans 26 pays et jusqu’à 200 sites, y compris en Asie, au Moyen-Orient, en Amérique du Nord et en Europe. EZ10 n’a ni volant, ni pédale d’accélérateur, ni pédale de frein, étant 100% sans conducteur. Par rapport aux voitures normales, les accélérateurs matériels, tels que les GPU, les CPU et les FPGA, sont extrêmement importants pour les véhicules autonomes, car ils permettent d’effectuer des tâches de calcul intensives.
En réponse à une augmentation exponentielle de l’utilisation des véhicules autonomes dans le monde entier, 7StarLake développe continuellement des produits adaptés aux voitures à conduite autonome. Les PC GPGPU de 7StarLake fournissent une structure complète pour le traitement des images et la conduite avec une fiabilité remarquable pour diverses conditions imprévisibles et une adaptation parfaite pour un usage multiple. Il peut traiter les données de différents capteurs de vision de manière synchrone et offre une solution performante pour la conduite automatisée qui prend en charge toutes les interfaces de capteurs, les bus et les réseaux pertinents.