.svg)
Depuis quelques années, nous avons remarqué une évolution de la technologie liée à la vision. En effet, de nombreuses améliorations ont été notées dans le domaine de la robotique, grâce à la détection d'images 2D. Parmi toutes ces nouvelles avancées, un grand nombre d'applications ont permis d'améliorer considérablement la qualité et l'efficacité des opérations, en se tournant vers la 3D. Mais connaissez-vous réellement la signification de la 3D ?
Le terme 3D est l'abréviation de l'expression "3 dimensions". C'est pourquoi, ici, nous parlons d'un espace tridimensionnel. Comme vous le savez si bien, un objet à toujours 3 faces visibles à l'œil nu, comme nous le montre le schéma ci-dessous.
Dans le domaine de la technologie de vision 3D, les robots guidés par une intelligence artificielle grâce à leur vision peuvent :
- Localiser des composants individuels à plusieurs centaines de mètres ;
- Déterminer l'application correcte d'une machine ;
- Identifier des personnes ;
- Et achever un scénario d'assemblage dans une usine.
Au cours des nombreuses étapes de son développement, les machines visions ont été adoptée par de nombreuses entreprises. Ces dernières ont constaté dans un premier temps sa valeur indirecte pour aider leurs clients dans une tâche précise. Et dans un second temps sa valeur directe pour perfectionner leurs processus de production. Maintenant, nous allons étudier ensemble le cas des robots bornes.
Transformer les "voitures qui cherchent des bornes" en "bornes qui vont vers les voitures"
Le robot guidé par vision 3D dont nous allons évoquer dans les lignes suivantes, est un automate qui offre aux utilisateurs une option de recharge économique et flexible. De ce fait, les "voitures à la recherche de kiosques" sont transformées en "kiosques à la rencontre des voitures". Pour expliquer simplement, toute place de stationnement ; pour voiture électrique ; peut être désormais transformée en borne de recharge. Lorsqu'une automobile s'engage en direction d'une borne de recharge sans personnel, le conducteur n'a pas besoin de descendre du véhicule. L'Android se tient à côté de la station de recharge, ses "yeux" peuvent aider à localiser avec précision le port de recharge, et guider la prise de recharge vers un rechargement automatique. Ensuite, la prochaine étape consiste au robot à fermer automatiquement le couvercle de la station de charge, lorsque celle-ci est terminée. L'ensemble du processus ne dure que quelques minutes, de sorte que la voiture suivante peut être réapprovisionnée immédiatement, après que la précédente ait terminé.
Des caractéristiques techniques avancées
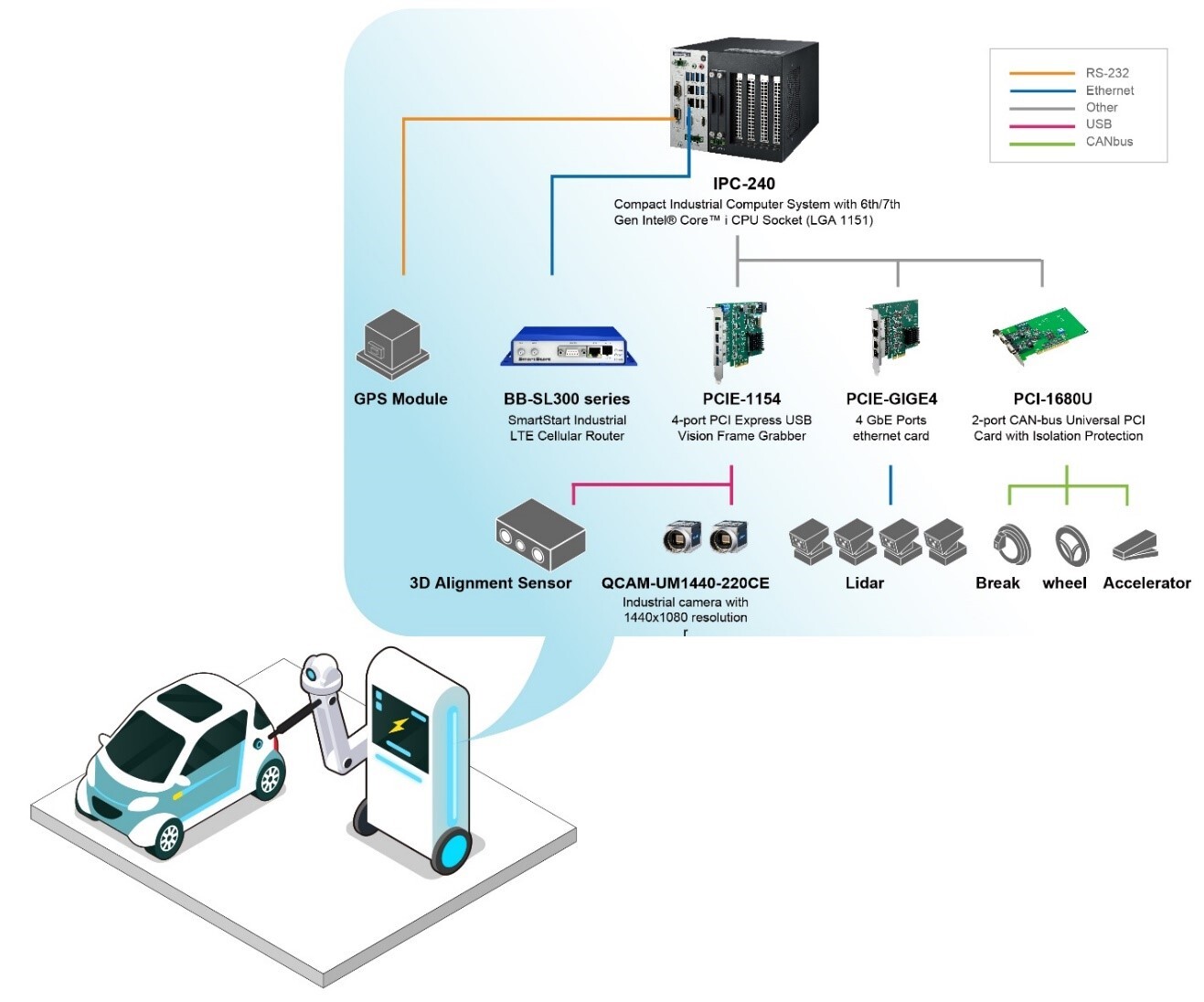
Maintenant, parlons un peu de technicité. Les machines guidées par vision 3D sont composées de systèmes de vision artificielle, de systèmes de véhicules guidés automatisés (VGA), de moteurs d'entraînement, de batteries, d'un PC industriel, de capteurs de positionnement 3D (caméras binoculaires), de radars laser, de switchs, de modules de réseau 4G/5G, de haut-parleurs et d'autres composants. Étant donné que le robot utilise principalement l'USB 3.0 pour connecter les caméras, afin d'assurer un guidage complet et la capture d'images, il est important de disposer d'une solution de bord verrouillable, de petite taille, performante et fiable.
Une combinaison de systèmes d'inspection et de contrôle par vision
Le robot guidé par vision 3D doit effectuer des tâches précises telles que :
- L'identification autonome (reconnaissance des visages, analyse du comportement) ;
- La communication réseau ;
- Et le positionnement visuel.
Lors de la conduite, le module réseau est utilisé pour obtenir une localisation précise. Les cartes, et les caméras intelligentes qui l'entourent sont utilisées pour obtenir des données environnementales. Dans la même lignée, le radar laser mesure la distance et détecte les obstacles qui se trouvent sur son chemin ; ou bien pour trouver aisément les ports de charge, lorsqu'il s'approche de véhicules électriques. Il utilise également des caméras binoculaires pour localiser avec précision le robot, et le contrôler pour le recharger.
Des spécificités propres à Advantech
À présent, parlons du matériel utilisé afin de construire le robot. Ce dernier est équipé d'un système informatique industriel compact : le IPC-240 d'Advantech, comme contrôleur principal. Ce PC fanless comporte de nombreux emplacements d'extension d'E/S et de cartes PCIe/PCI, qui s'adaptent parfaitement aux applications du client. Nous retrouvons pareillement de l'acquisition d'images (USB), de la communication (LAN) et de contrôle de bus. Sa taille compacte et sa conception stable le rendent facile à installer sur le robot. En ce qui concerne les applications de vision, le robot utilise la carte PCIE-1154 (une carte d'acquisition d'images USB à 4 ports). Celle-ci est équipée de ports USB 3.0 isolés pour l'interface de la caméra, avec une bande passante indépendante, pour garantir une transmission de données stable sans perte de trame. De plus, il est possible de verrouiller la conception afin d'assurer une connexion de câble fiable. S'ajoute à cela, une carte d'extension PCE-GIGE4 avec un adaptateur Intel® Ethernet controller i210 qui est connectée au radar laser. Par conséquent, il est possible de transmettre rapidement des données. Pour finir avec les cartes de communication, nous retrouvons une PCI-1680U qui va permettre de contrôler le mouvement du robot, notamment le freinage, le changement de direction et l'accélération. En ce qui concerne la communication industrielle, un routeur externe Advantech de la série BB-SL305 est connecté, et il prend en charge le LTE full Netcom.
Des caractéristiques industrielles pour le succès du robot
La gamme complète de produits d'Advantech permet aux clients d'obtenir facilement des solutions hautement intégrées. Le système compact IPC-240 avec processeur Intel® 7th Gen Core™ i maintient la flexibilité de l'extension de plusieurs cartes PCIe/PCI, ce qui permet d'obtenir les meilleures performances avec une taille ultra-compacte. La conception de la tension d'entrée industrielle, associée au système de ventilateur intelligent, peut assurer un fonctionnement stable du CPU Core i même dans des environnements difficiles. De la sorte, il est difficile pour les performances ralentir, offrant ainsi une grande stabilité. L'Advantech IPC-240 utilise la mémoire Micron 16 GB DDR4 SODIMM cadencée à 3 200 MHz, comme le Micron 5300PRO qui est un SSD 2.5" SATA3 basé sur 3DTLC. Il en résulte que les performances, la qualité, la fiabilité et la longévité nécessaires aux applications robotiques obtiennent des résultats plus que satisfaisants.

Dorénavant, lorsque vous verrez des automates s'approcher de vous pour faire le plein de votre voiture, sachez qu'ils ont été conçus pour vous satisfaire le plus rapidement possible.



![Comment un routeur industriel protège votre réseau de production ? [Étude de cas]](https://connect.factorysystemes.fr/hs-fs/hubfs/01%20-%20Factory%20Systemes/12%20-%20Blog/2026/Comment%20un%20routeur%20industriel%20prot%C3%A8ge%20votre%20r%C3%A9seau%20de%20production.png?width=680&height=460&name=Comment%20un%20routeur%20industriel%20prot%C3%A8ge%20votre%20r%C3%A9seau%20de%20production.png)
![Comment les tablettes durcies Winmate optimisent les opérations militaires ? [Étude de cas]](https://connect.factorysystemes.fr/hs-fs/hubfs/01%20-%20Factory%20Systemes/01%20-%20Site%20internet/02%20-%20Nos%20offres/02%20-%20Pages%20th%C3%A9oriques/06%20-%20Mobilit%C3%A9%20durcie/Tablette%20militaire_7.webp?width=680&height=460&name=Tablette%20militaire_7.webp)



